Lab 7 Report
In this lab, we implemented a Kalman filter on our ToF sensor data in an attempt to improve the accuracy and speed of the movements in Lab 5.
Lab Tasks
System Identification (Task 1)
Our first task is to identify A and B matrices for our plant (the robot). My approach to this problem differed significantly from the suggested method in the lab manual. I go through the lab manual method and my results using this method, but I do not go through it in great detail for the sake of brevity. I go through the method I used in great detail, to show that my method is equivalent and deserves equivalent credit for this lab.
The method in the lab manual was as follows:
- Record a step response on the robot up to a speed in the ballpark of the speed at which the robot would be moving during the movement
- Crudely estimate the maximum speed of the robot, and use it to calculate drag
d - Crudely estimate the 90% rise time of the step response, and use it to calculate momentum
m - Formulate the continuous-time A and B matrices using the following equation from lecture slides:
- Finally, discretize these matrices using the following equations to get the discrete-time A and B matrices
AdandBd:
I followed this method to the best of my ability, but was unable to get a good system identification. This image shows the best result I was able to obtain in my Python implementation using this method. It is clear the the Kalman filter is not accurately estimating the trajectory of the plant given the ToF sensor readings, even after adjusting the initial covariance matrix values, d, and m extensively.
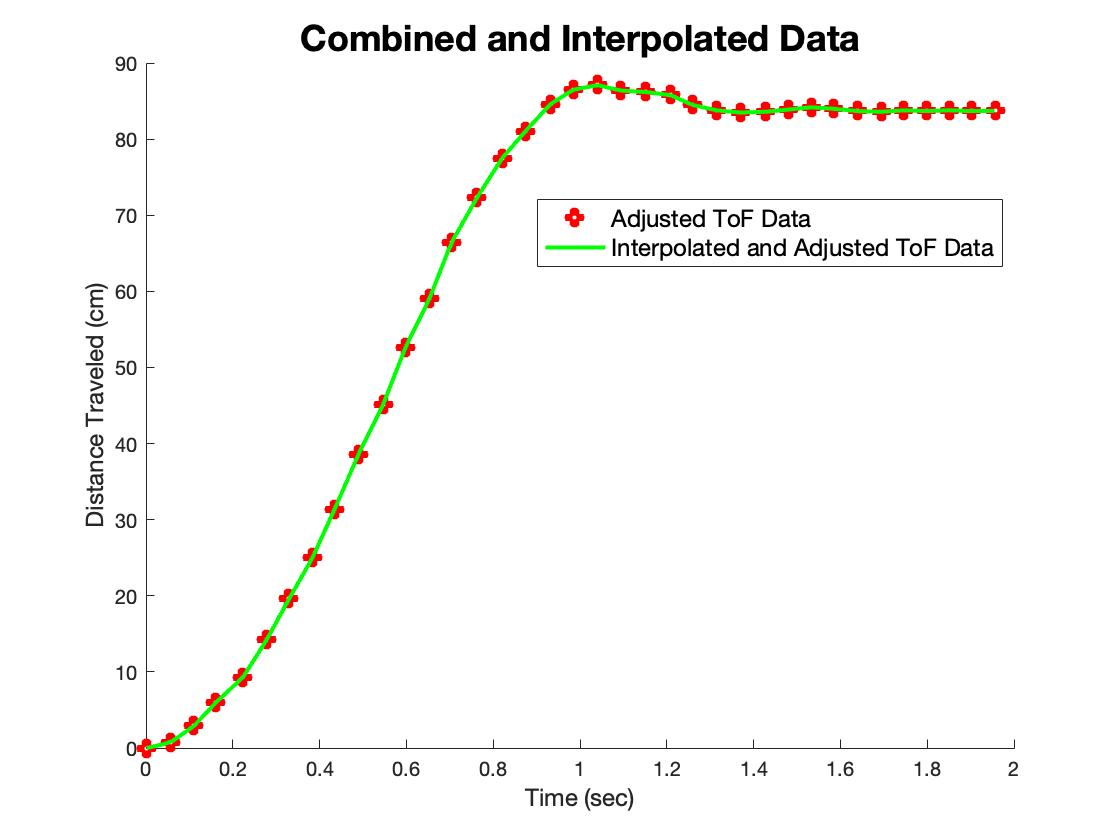
I instead use a more math-heavy method to directly estimate the Ad and Bd matrices. First, I collected ToF and control output data from a run of Lab 5 and imported it into MATLAB. After choppping off some extraneous data points close to the beginning and end of the run, I interpolated the ToF data so that there were the same number of elements in the ToF data array as there as there were control loops. I also adjusted the ToF sensor measurements such that that the robot’s starting position corresponded to x = 0, so that my “distance” was no longer a distance to the wall, but a distance from the starting point. This was just so that an input of zero corresponded to a distance of zero initially, and that a positive input corresponded to a positive increase in x (distance from starting point) and velocity. After doing this, here is the plot:
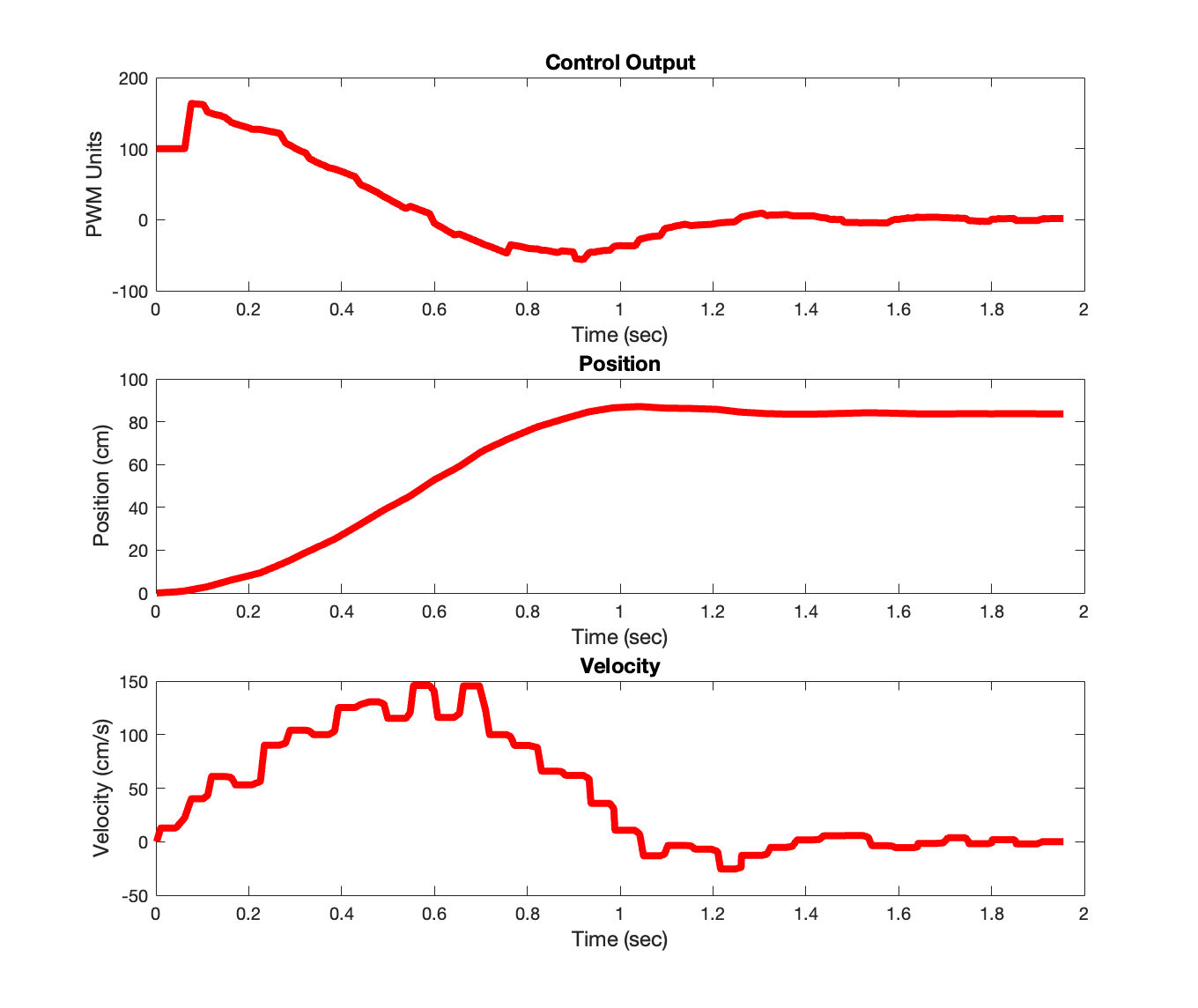
I then calculated the velocity at each time step, and plotted the adjusted x, u, and xdot simulataneously:
We are now ready to perform system identification. We are trying to find six numbers: the four elements in our A matrix, and the two elements of our B matrix, which we will label as follows:
For each time step, writing out the top row and bottom row of this matrix equation gives us linear equations for our unknowns (the elements of the A and B matrices), which we can write out as a giant system of equations like so:
This is an overdefined system, as we have many more than six equations for our six unknowns. Thus, we can use Least Squares to find the vector of unknowns that best solves this equation. Once we have this solution, we can simply construct our Ad and Bd matrices:
To check the accuracy of our system, we can plot the response given the vector of motor inputs that we used to perform the system ID, resulting in the following plot:
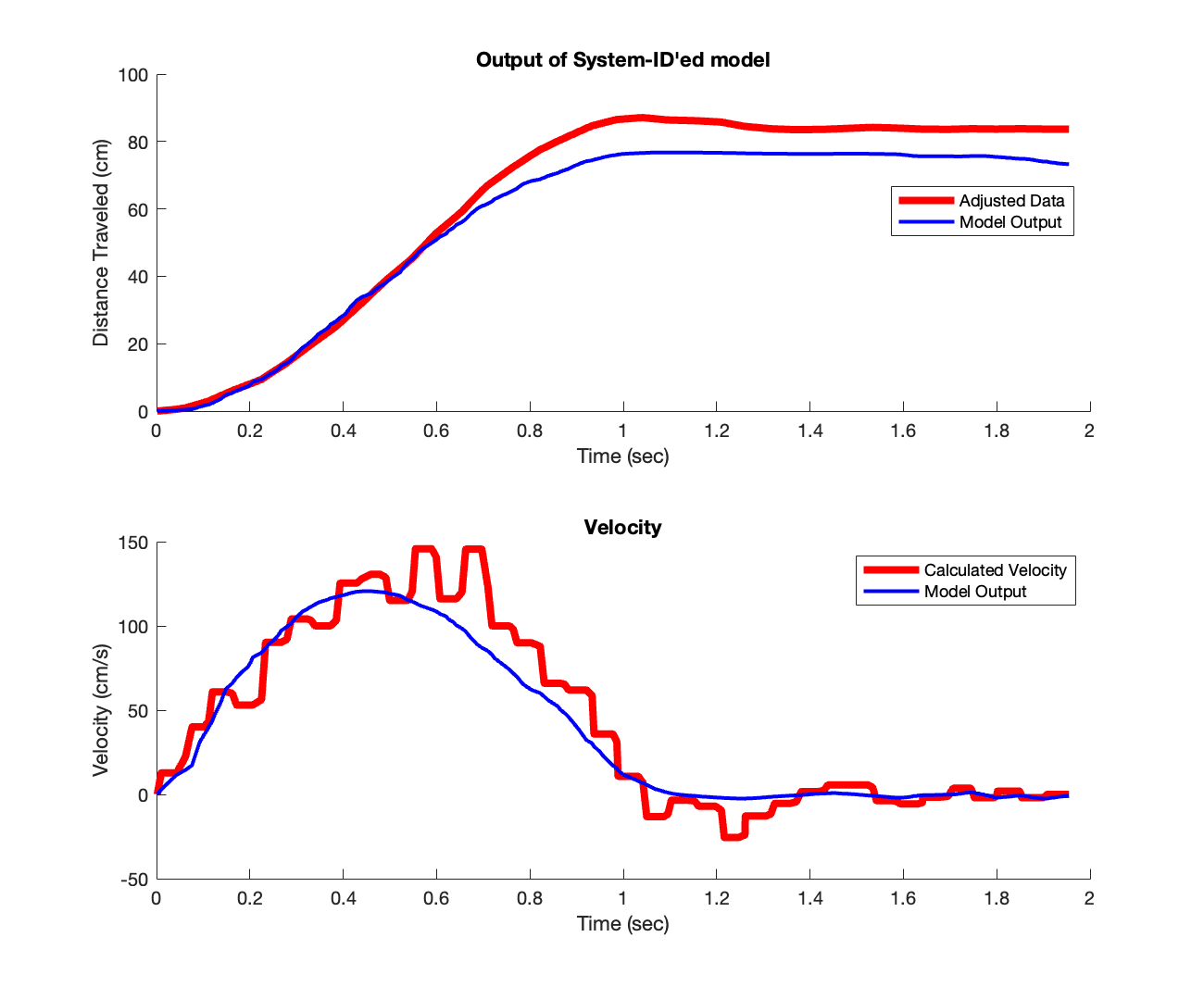
We see that the system ID fits the provided data quite well, as expected. This completes the system identification.
Below are some relevant MATLAB code snippets. This is the code to construct the least squares matrix. A_lsqr and b_lsqr are named as such to distinguish them from the A and B matrices of the state space model. x, xdot, and u are the interpolated and adjusted ToF sensor values, calculated velocity values, and control signal values, respectively.
% Construct A matrix for least squares
A_lsqr = zeros((size(x, 1) - 1) * 2, 6);
for i = 1:(size(x, 1) - 1)
A_lsqr(2*i - 1, :) = [x(i) xdot(i) u(i) 0 0 0];
A_lsqr(2*i, :) = [0 0 0 x(i) xdot(i) u(i)];
end
% construct b vector for least squares
b_lsqr = zeros((size(x, 1) - 1) * 2, 1);
for i = 1:(size(x, 1) - 1)
b_lsqr(2*i - 1) = x(i+1);
b_lsqr(2*i) = xdot(i+1);
end
result = lsqr(A_lsqr, b_lsqr);
This code snippet calculates the x, xdot, and u vectors as described above. ctrl_outputs holds the control signal output values, and tof_values holds the interpolated and adjusted ToF sensor values:
u = ctrl_outputs';
x = tof_values';
xdot = zeros(size(x));
n = size(x, 1);
for i = 2:n
xdot(i) = (x(i) - x(i-1)) / (ctrl_times(i) - ctrl_times(i-1));
end
This code snippet interpolates the incoming raw ToF data to the length of the control signal output array, and adjusts it so that the position is measured from the distance from the start, instead of distance from the wall:
temp = interp1(tof_times, tof_values_raw, ctrl_times);
temp = temp * -1;
first = temp(1);
tof_values = temp - first;
temp = tof_values_raw * -1;
first = temp(1);
tof_values_raw_adjust = temp - first;
Python Implementation (Tasks 2, 3)
Armed with our System Identification, we proceed to implement the Kalman Filter in Python to make sure that it works in “simulation” before implementing it on the physical hardware (the robot).
Below is the Kalman Filter function in Python, copying the algorithm from lecture slides:
def kf(mu, sigma, u, y, A, B, C, sig_u, sig_z, update):
mu_pred = A.dot(mu) + B.dot(u)
sigma_pred = A.dot(sigma.dot(A.T)) + sig_u
if update:
sigma_m = C.dot(sigma_pred.dot(C.T)) + sig_z
kkf_gain = sigma_pred.dot(C.T.dot(np.linalg.inv(sigma_m)))
y_m = y - C.dot(mu_pred)
mu = mu_pred + kkf_gain.dot(y_m)
sigma = (np.eye(2) - kkf_gain.dot(C)).dot(sigma_pred)
return mu, sigma
else:
return mu_pred, sigma_pred
Next, we run the Kalman filter on the data that we got from our Lab 5 run, to ensure that the Kalman Filter successfully follows the ToF data as it comes in, while also predicting the evolution of the state of the system between ToF updates. Here is the Python code to do this:
end_time = ctrl_times[-1]
kf_times = list()
kf_output = list()
kf_output_vel = list()
curr_time = 0
tof_arr_ix = 0
ctrl_arr_ix = 0
update = True
# initial values
sigma = np.array([[2**2, 0], [0, 5**2]])
x = np.array([[0], [0]])
tof_times[0] = 0 # set this so that the initial values will work correctly
while curr_time < end_time:
# if we have a new ToF sensor value
if tof_arr_ix < len(tof_times) and tof_times[tof_arr_ix] <= curr_time:
update = True
tof_arr_ix += 1
else:
update = False
# calculate what the adjusted y-value should be
y_adjust = tof_initial - tof_values[tof_arr_ix - 1]
# call kalman filter
x, sigma = kf(x, sigma, ctrl_outputs[ctrl_arr_ix], y_adjust, A, B, C, sig_u, sig_z, update)
# store values
kf_output.append(tof_initial - x[0][0])
kf_output_vel.append(0.0 - x[1][0])
kf_times.append(curr_time)
# increment time
curr_time = ctrl_times[ctrl_arr_ix]
ctrl_arr_ix += 1
Notice that because the Kalman filter belives that the state (mu) is in terms of distance from the start, we need to perform the transformation y_adjust = tof_initial - tof_values[tof_arr_ix - 1] and pass y_adjust into the kf() function. Later, when we store the output of the Kalman Filter, we need to transform it back by appending tof_initial - x[0][0] to the kf_output array. Running this code results in the following plot:
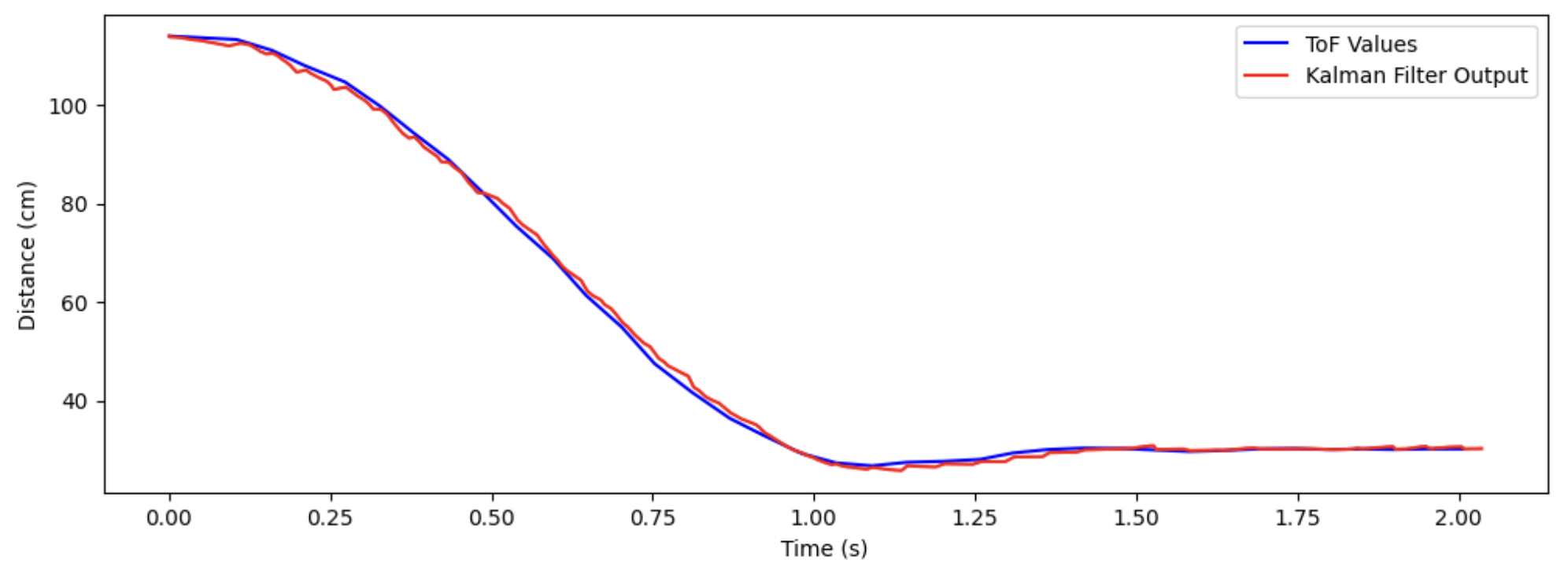
This shows quite good agreement between the ToF sensor values and the Kalman Filter output. We see that between ToF sensor updates, the Kalman Filter output is, for the most part, predicting the evolution of the state with decent accuracy. This shows that our system ID and initial covariance matrices are working as expected.
Discussion of Initial Covariance Matrices
To initialize the Kalman Filter, we need to set some initial covariance matrices. I defined them like so:
sigma_1 = 2.0
sigma_2 = 10.0
sigma_3 = 7.0
sig_u = np.array([[sigma_1**2, 0],[0, sigma_2**2]])
sig_z = np.array([[sigma_3**2]])
sigma_1 represents the square of the uncertainty (standard deviation) in the position at the start; I set it to 2 cm, which seemed reasonable to me because the ToF sensors are quite accurate and our model for the position of the robot is relatively accurate. sigma_2 represents the square of the uncertainty in the velocity at the start. Though we are very certain that that velocity is 0 cm/s at the beginning, since the velocity is a calculated / derived variable, it is subject to a lot more noise, especially at the slow speeds the robot starts moving at. Therefore, I set this uncertainty to be quite high (10 cm/s), so that the Kalman Filter doesn’t freak out when its velocity calculation yields a number far outside of its expected value. sigma_3 is the square of the uncertainty of the sensor measurements as they come in. I started with a guess of 2 cm at first, and gradually increased it until I thought the prediction of the filter was smoothest and matched the incoming sensor data best. I didn’t really have an intuitive explanation for why I chose 7 cm for this value.
Robot Implementation (Tasks 4, 5)
To implement the code on the robot, I first added a global variable (new_tof_data) which would be set to True when new ToF data was received. This was added in the if statement in the loop() function where we acquire ToF sensor data. The run_pid() function is called outside of the ToF sensor update if statement, meaning that it is running as fast as possible (Task 5) and that the rate at which we run the control loop is faster than the rate at which we acquire the ToF sensor data:
// if want to run PID loop
if (run_pid_loop) {
// if space in the TOF sensor array
if (tof_arr_ix < tof_log_size) {
// if first measurement, simply start a measurement
// else, if sensor(s) has/have data ready, take measurement(s) and record, and start a new measurement(s)
if (tof_arr_ix == -1) {
myTOF1.startRanging();
myTOF2.startRanging();
tof_arr_ix++;
} else if (myTOF1.checkForDataReady() && myTOF2.checkForDataReady()) {
tof_data_one[tof_arr_ix] = ((float) myTOF1.getDistance()) / 10.0;
tof_data_two[tof_arr_ix] = ((float) myTOF2.getDistance()) / 10.0;
tof_times[tof_arr_ix] = micros();
new_tof_data = true; // <-------------- ADDED LINE HERE -----------
myTOF1.clearInterrupt();
myTOF1.stopRanging();
myTOF1.startRanging();
myTOF2.clearInterrupt();
myTOF2.stopRanging();
myTOF2.startRanging();
tof_arr_ix++;
}
}
run_pid(new_tof_data); // <------------ CALLED WITH BOOLEAN ----------
new_tof_data = false; // <------------- RESET THE BOOLEAN ------------
}
In my run_pid() function, I added an argument to pass in when we have updated ToF data. In my calculation of the error, I now use the output of the Kalman Filter (stored in the kf_tof_data array) as my measured value. This changes the beginning of the function to the following:
void run_pid(bool new_tof_data) {
unsigned long curr_time = micros();
// call kalman filter to get the predicted value of the tof sensor
Matrix<1> u = (ctrl_arr_ix == 0) ? 0.0 : ctrl_output[ctrl_arr_ix - 1];
Matrix<1> y = (tof_arr_ix == 0) ? 0.0: tof_data_two[tof_arr_ix - 1];
kalman_filter(&glob_state, u, y, new_tof_data);
// calculate error using kalman filter estimated data
float err = kf_tof_data[ctrl_arr_ix] - SETPOINT;
// the rest of the function is the same as in previous labs, see lab 5/6 for more information
// ...
}
Finally, I implemented the Kalman Filter in Arduino:
void kalman_filter (kf_state_t *state, Matrix<1> u, Matrix<1> y, bool update) {
// take care of edge case when we have no data point from ToF
if (tof_arr_ix == 0) {
// pretend we're reading the set point
kf_tof_data[ctrl_arr_ix] = SETPOINT;
return;
} else if (tof_arr_ix == 1) {
// if first tof data point, set it to the initial distance we will use
init_dist = tof_data_two[0];
}
// adjust the y to be distance traveled instaed of distance from wall
y = init_dist - y;
Matrix<2, 1> prev_mu = state->mu;
Matrix<2, 2> prev_sigma = state->sigma;
// Define constant matrices
Matrix<2, 2> A = {0.99995, 0.0084844, -0.00033056, 0.98778};
Matrix<2, 1> B = {0.00033969, 0.029691};
Matrix<1, 2> C = {1, 0};
Matrix<2, 2> sig_u = {4.0, 0, 0, 100.0};
Matrix<1> sig_z = 49.0;
Matrix<2, 2> id_2 = {1, 0, 0, 1}; // 2x2 identity matrix
// Prediction step
Matrix<2, 1> mu_pred = A * prev_mu + B * u;
Matrix<2, 2> sigma_pred = A * (prev_sigma * ~A) + sig_u;
// If not updating, stick these two results into here and return
if (!update) {
state->mu = mu_pred;
state->sigma = sigma_pred;
kf_tof_data[ctrl_arr_ix] = init_dist - state->mu(0, 0);
return;
}
// If updating, we do this math and then return
Matrix<1, 1> sigma_m = C * (sigma_pred * ~C) + sig_z;
Matrix<2, 1> kkf_gain = sigma_pred * (~C * Inverse(sigma_m));
Matrix<1, 1> y_m = y - C * mu_pred;
state->mu = mu_pred + kkf_gain * y_m;
state->sigma = (id_2 - kkf_gain * C) * sigma_pred;
kf_tof_data[ctrl_arr_ix] = init_dist - state->mu(0, 0);
}
Again, since the Kalman Filter thinks that x = 0 is the initial position of the robot, we need to perform a transformation of the ToF sensor data (y = init_dist - y) before feeding the sensor data into the Kalman Filter; likewise, we need to transform the output of the Kalman Filter (state->mu(0, 0)) into distance from the wall (kf_tof_data[ctrl_arr_ix] = init_dist - state->mu(0, 0)).
I added the following lines to the START_PID_MVMT command handler in the handle_command() function to initialize the Kalman Filter covariance matrices:
case START_PID_MVMT:
run_pid_loop = true;
ctrl_start_time = micros();
integral = 0.0;
prev_err = 0.0;
// initialize KF values
glob_state.mu = {0, 0};
glob_state.sigma = {4, 0, 0, 0.25};
break;
To hold the Kalman Filter state, I defined a new struct and instantiated a global variable of this type called glob_state. This is the variable that I reference in run_pid() and in the START_PID_MVMT command handler:
typedef struct {
Matrix<2, 1> mu;
Matrix<2, 2> sigma;
} kf_state_t;
kf_state_t glob_state;
We are finally ready to run the robot with the Kalman Filter implemented. The implementation of the notification handler and calling of the Python commands are ommitted here for brevity; for more information, please consult any of my previous lab reports. Here is a video demonstrating that the PID controller is able to run while using the Kalman Filter estimates to calculate the error:
Below is a plot associated with this movement showing relevant data:
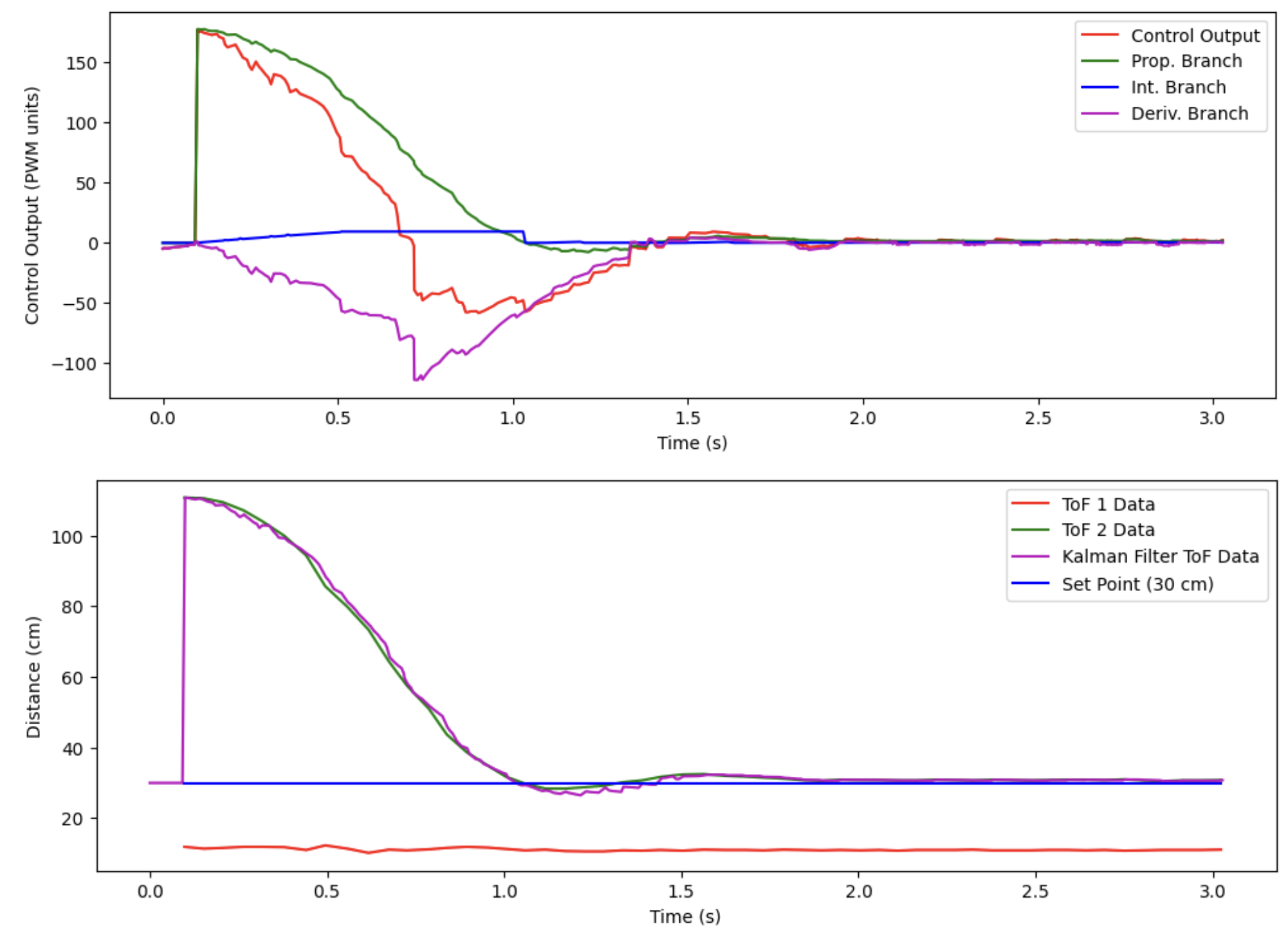
We can see that the Kalman Filter is following the incoming ToF sensor data throughout the test, and is also predicting the evolution of the states of the robot with decent accuracy between ToF sensor updates. The following screenshot shows the length of the ToF sensor readings array and length of the control outputs array over the 3 seconds that this test was run:
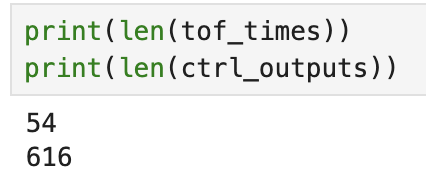
This gives a ToF sensor data acquisition rate of a little less than 20 Hz, and a control loop frequency of a little over 200 Hz! This proves that the control loop is being run at a frequency much higher than ToF sensor data is being acquired, yet the Kalman Filter is allowing us to relatively smoothly (more so than linear extrapolation) capture the evolution of the robot state in the absence of new ToF data!
Acknowledgements
- Prof. Helbling (for helping me debug my Arduino code and fixing a really subtle but frustrating bug…)
- Katarina Duric (for offering some suggestions on how to proceed with the robot implementation / what to expect)
- Sophia Lin (lab partner)